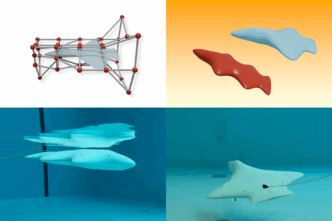
MIT CSAIL and University of Wisconsin researchers launched a new AI-powered method to design underwater gliders. These gliders mimic marine animals but use shapes far beyond typical tube or torpedo forms.
The AI tests 3D glider designs in a physics simulator, optimizing them for better hydrodynamics. The models then get 3D printed using less energy than handcrafted ones.
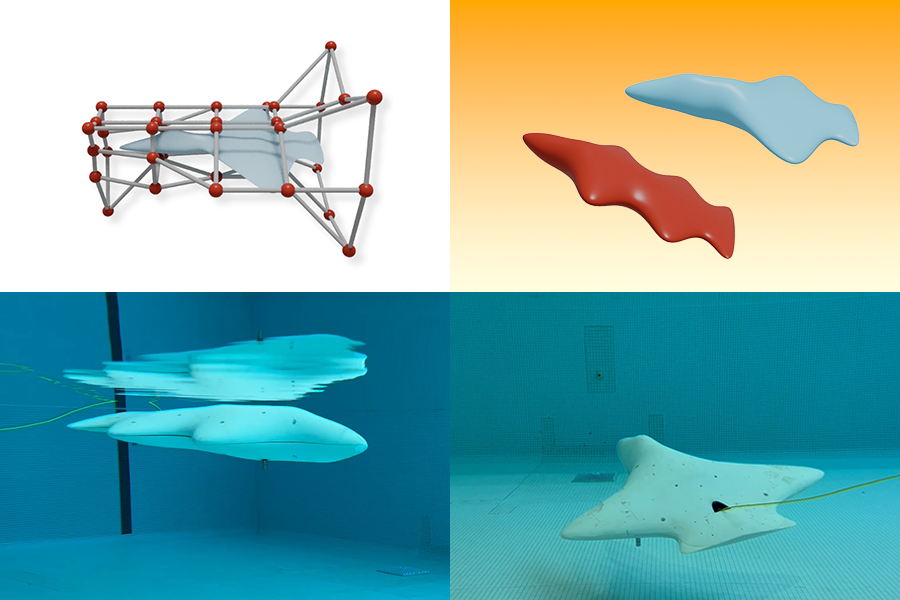
Two prototypes proved the concept: a two-winged glider like a paper airplane and a four-winged model shaped like a flat fish. Both outperformed traditional torpedo-shaped gliders with higher lift-to-drag ratios, meaning they swim more efficiently and consume less energy. 
“We’ve developed a semi-automated process that can help us test unconventional designs that would be very taxing for humans to design,” Peter Yichen Chen, MIT CSAIL postdoc, said.
“This level of shape diversity hasn’t been explored previously, so most of these designs haven’t been tested in the real world.”
The process starts by morphing existing underwater shapes like submarines, manta rays, and sharks using “deformation cages,” then simulates their performance at different angles of attack. A neural network predicts lift-to-drag ratios and selects the best designs.
Wind tunnel tests confirmed the AI’s predictions were only about 5% off. Real pool tests showed the AI-designed gliders were more efficient swimmers than handmade models.
“Our pipeline modifies glider shapes to find the best lift-to-drag ratio, optimizing its performance underwater,” MIT grad student Niklas Hagemann said.
“You can then export the top-performing designs so they can be 3D-printed.”
The gliders are 3D printed as hollow shells with small flood holes, housing electronics, pumps, and mass shifters inside. This design saves weight and material.
The team wants to close the gap between simulation and real-world results and add adaptability for unpredictable currents. They’re also eyeing thinner glider designs and faster, more customizable workflows.
This project received DARPA funding and involved OpenAI researcher Pingchuan Ma alongside MIT CSAIL lab director Daniela Rus and others. The full paper appeared at the International Conference on Robotics and Automation in June.